My name is Zifan Wang. I am a PhD student in Artificial Intelligence at The Hong Kong University of Science and Technology (Guangzhou), supervised by Prof. Junwei Liang.
If you have any interesting projects related to legged robots, please contact me! I am very eager to collaborate on creating intelligent robots.
Robotics Researcher
- Research focus on Legged Robots
- Publications at RSS, NeurIPS, CoRL, CVPR, IROS
- Optimal control & Reinforcement Learning
Full-Stack Roboticist
- Software: Python, C/C++, ROS/ROS2
- Hardware: STM32, Jetson
- Design: SolidWorks, Altium Designer
Academic Service
- Reviewer for T-RO, RAL, IROS
- Reviewer for CoRL, ICCV
- Reviewer for Humanoids
News
- 2026: New project: Perceptive Behavior Foundation Model (Code) — adapting human motion priors to robot-centric terrain (under review).
- 2026: One paper accepted by RSS 2026: GS-Playground (Code), a high-throughput photorealistic simulator for vision-informed robot learning.
- 2026: New preprint: UniLab (Code) — a heterogeneous architecture for robot RL beyond GPU-dominant paradigms.
- 2026: New preprint: DiT4DiT (Code) — jointly modeling video dynamics and actions for generalizable robot control.
- 2025: One paper accepted by NeurIPS 2025 on vision-language-action cross-task generalization.
- 2025: Two papers accepted by CoRL 2025 (OmniPerception & GLOVER++).
- 2025: Two papers accepted by IROS 2025 (Diffusion Planner & DISCOVERSE).
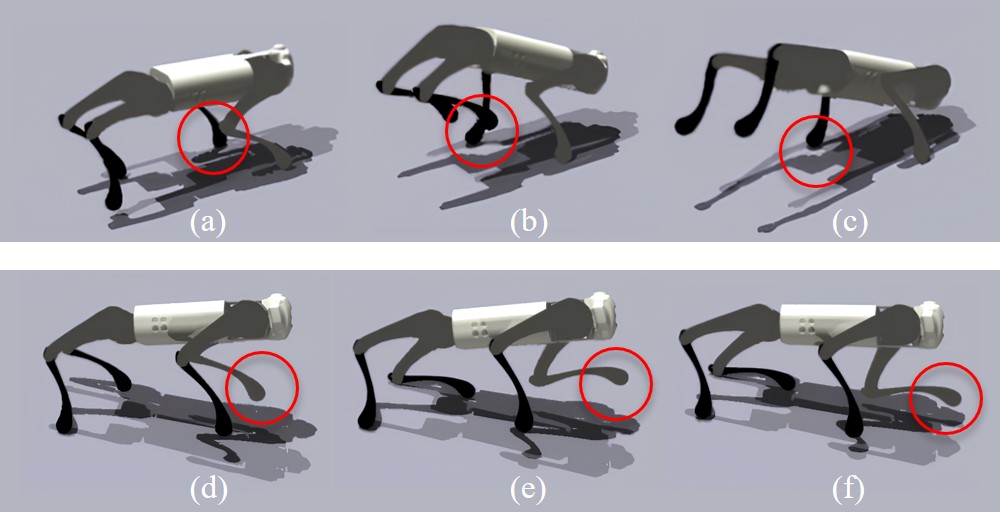
- 2025: One paper accepted by CVPR 2025 on mitigating human-robot domain discrepancy.
- 2024: One paper accepted by CoRL 2024 on contrastive imitation learning.
- 2024: One paper accepted by IROS 2024 on loco-manipulation for wheel-legged robots.
GitHub Stats
PMT
Research CodeOfficial implementation of Perceptive Behavior Foundation Model.
UniLab
Research CodeHeterogeneous architecture for robot RL beyond GPU-dominant paradigms.
GS-Playground
Research CodeHigh-throughput photorealistic simulator for vision-informed robot learning.
DiT4DiT
Research CodeJoint video dynamics and action modeling for generalizable robot control.
Awesome Loco-Manipulation
Open SourceCurated resources for loco-manipulation research and engineering.
Publications
Locomotion
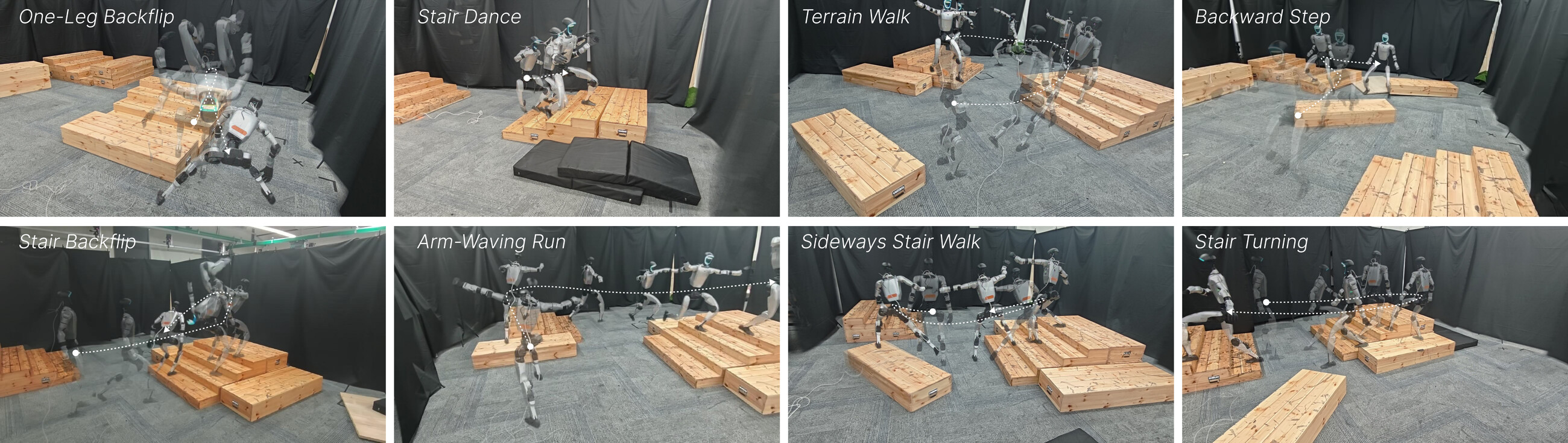
Perceptive Behavior Foundation Model: Adapting Human Motion Priors to Robot-Centric Terrain

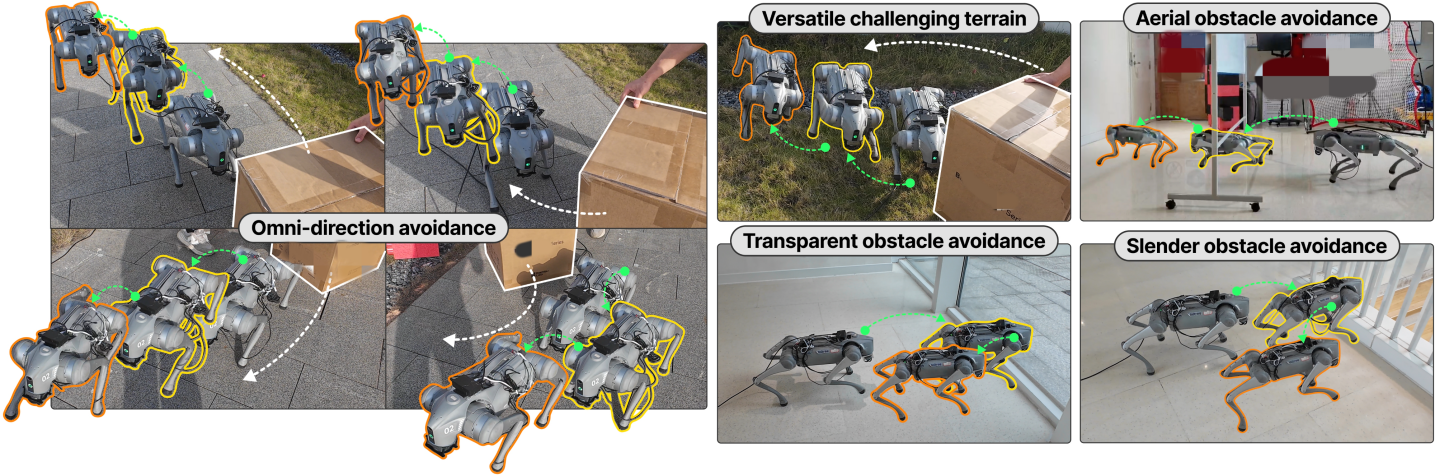
Omni-Perception: Omnidirectional Collision Avoidance for Legged Locomotion in Dynamic Environments
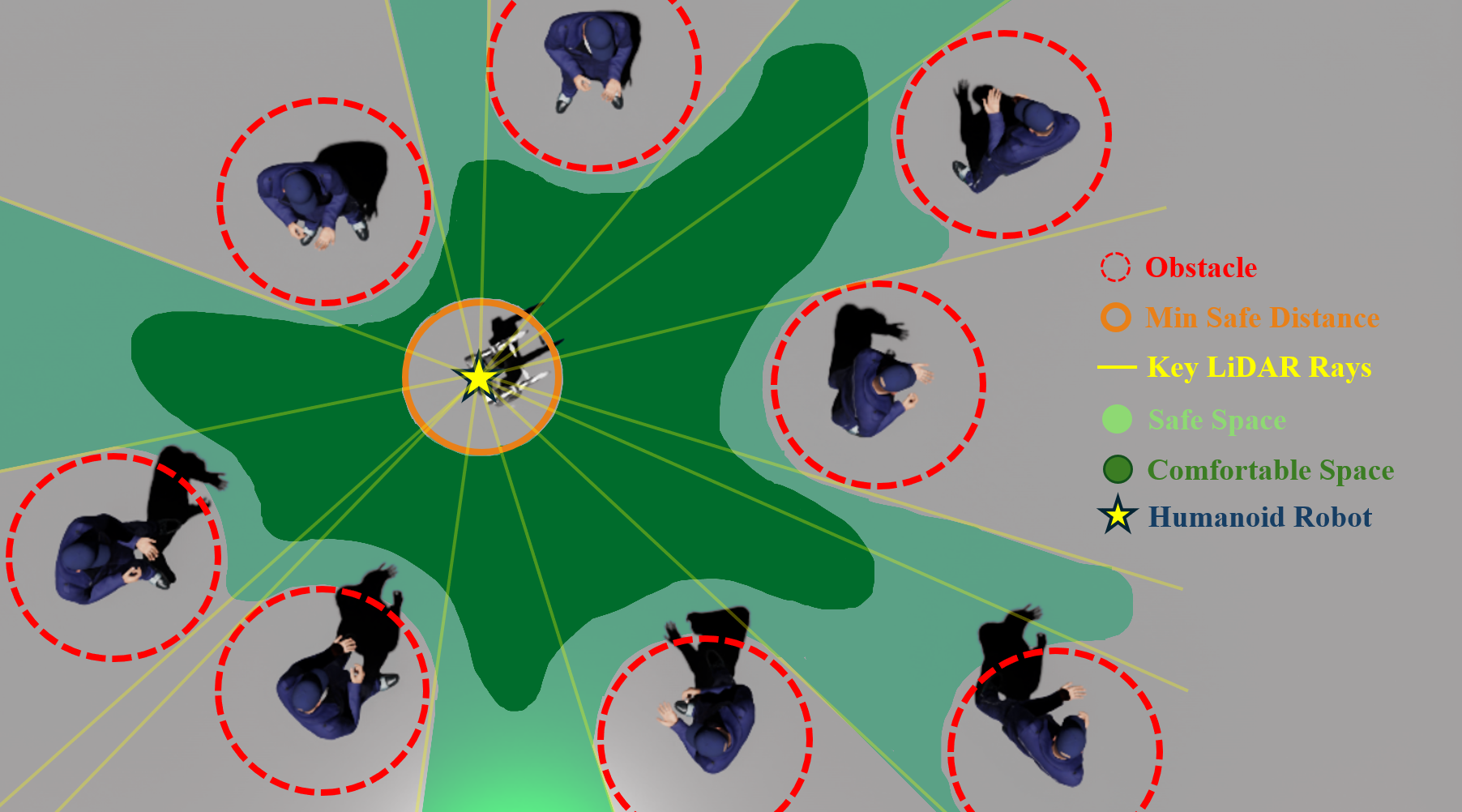
End-to-End Humanoid Robot Safe and Comfortable Locomotion Policy
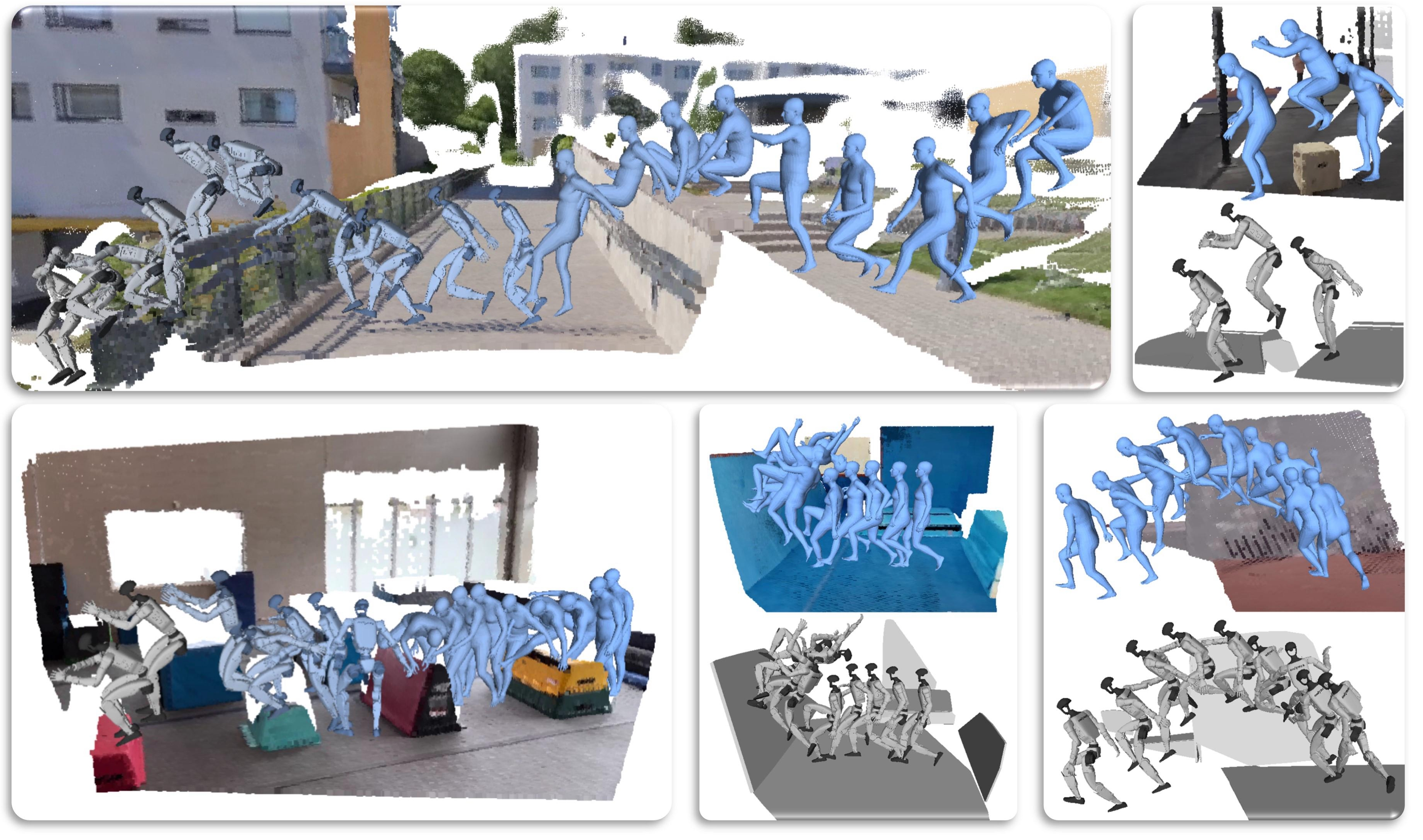
MeshMimic: Geometry-Aware Humanoid Motion Learning through 3D Scene Reconstruction
Loco-Manipulation

Arm-Constrained Curriculum Learning for Loco-Manipulation of a Wheel-Legged Robot
Manipulation & Imitation Learning
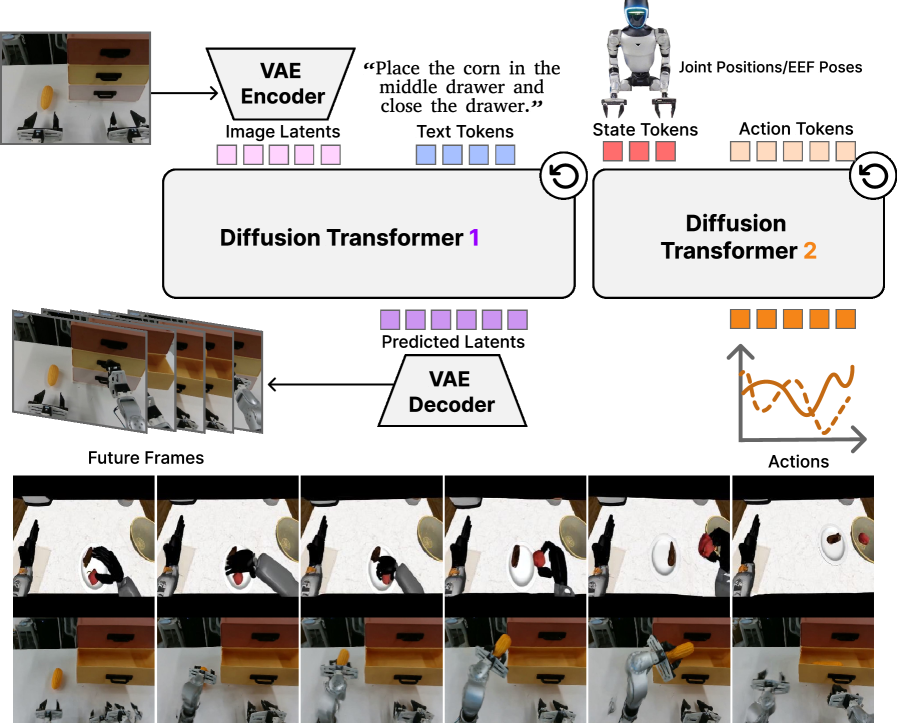
DiT4DiT: Jointly Modeling Video Dynamics and Actions for Generalizable Robot Control

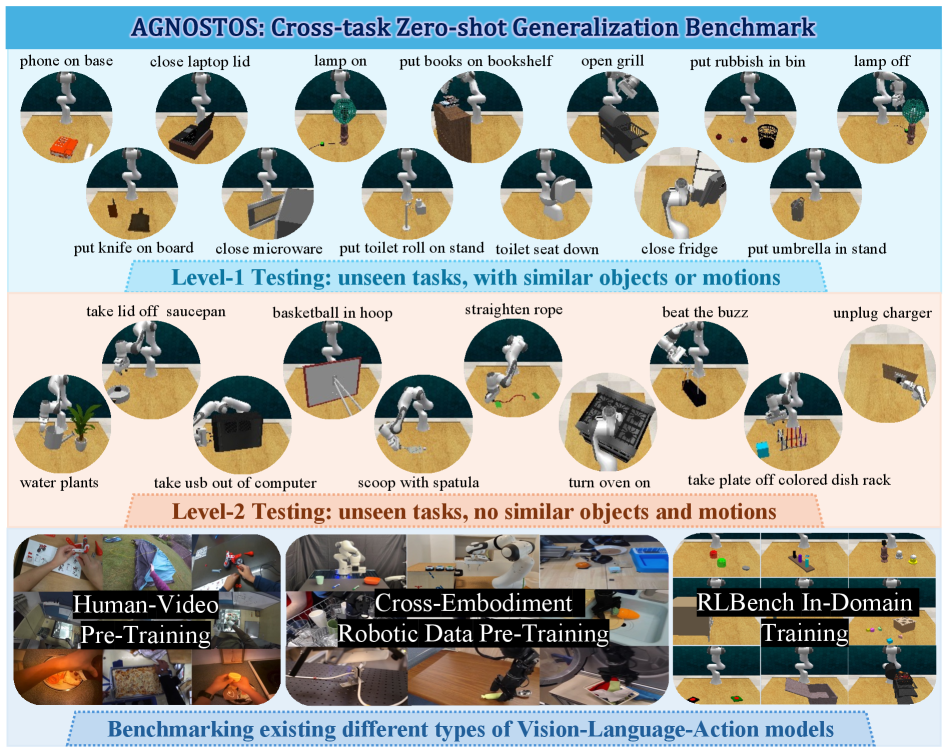
Exploring the Limits of Vision-Language-Action Manipulations in Cross-Task Generalization
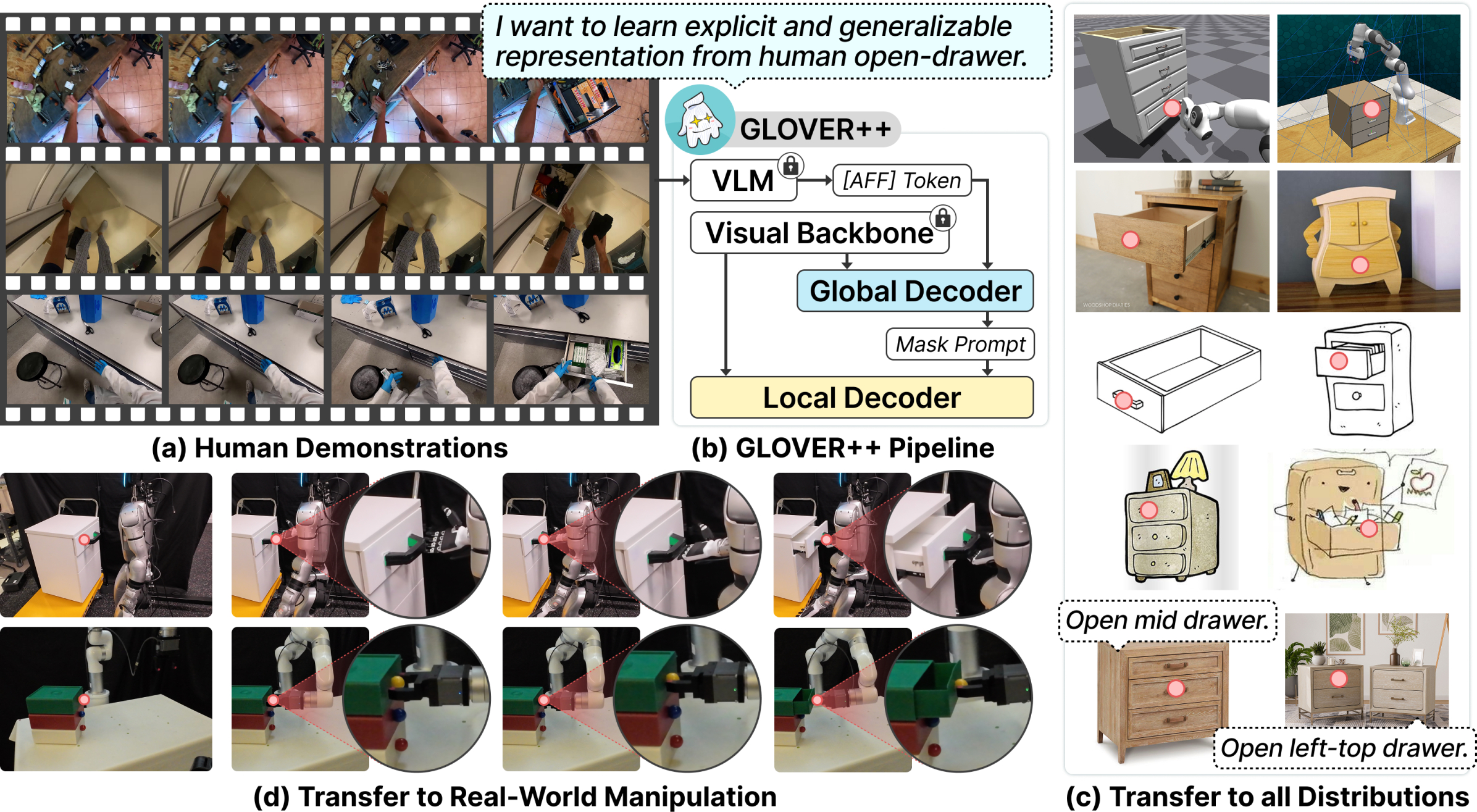
GLOVER++: Unleashing the Potential of Affordance Learning from Human Behaviors for Robotic Manipulation
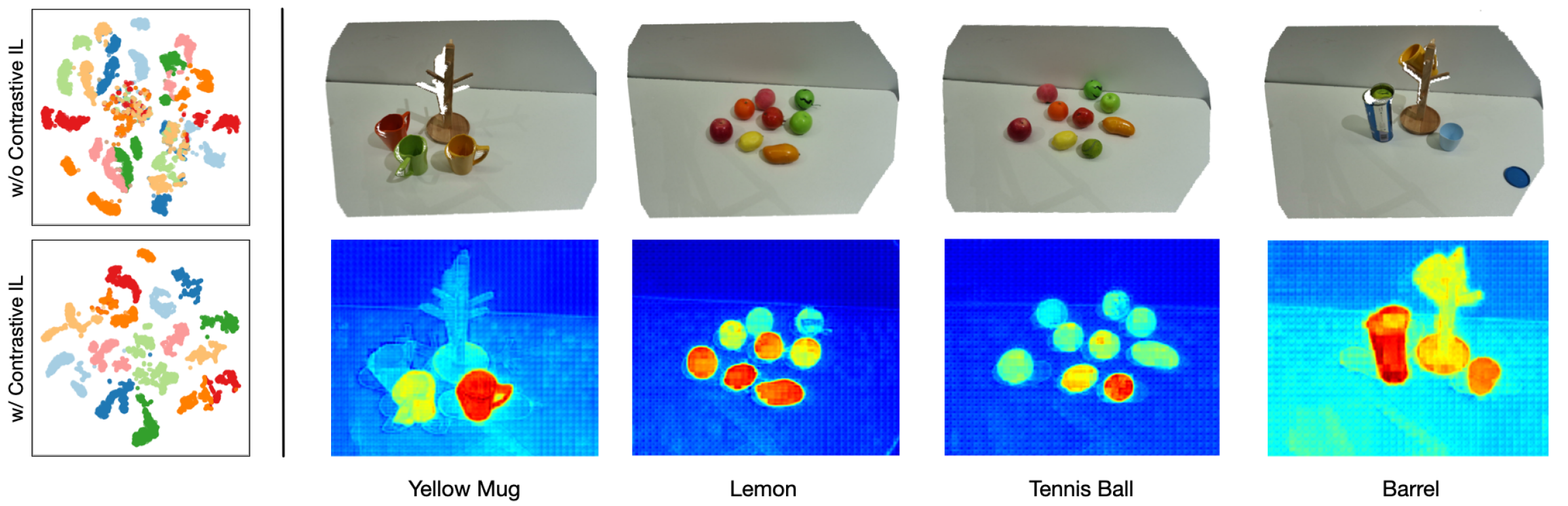
Contrastive Imitation Learning for Language-guided Multi-Task Robotic Manipulation
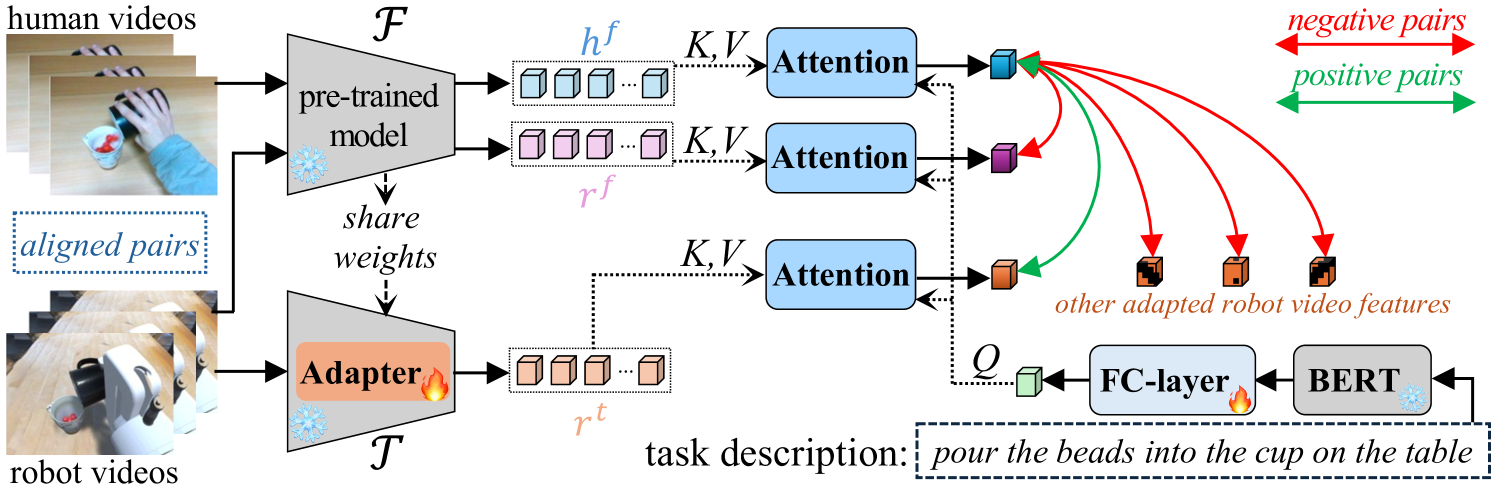
Mitigating the Human-Robot Domain Discrepancy in Visual Pre-training for Robotic Manipulation
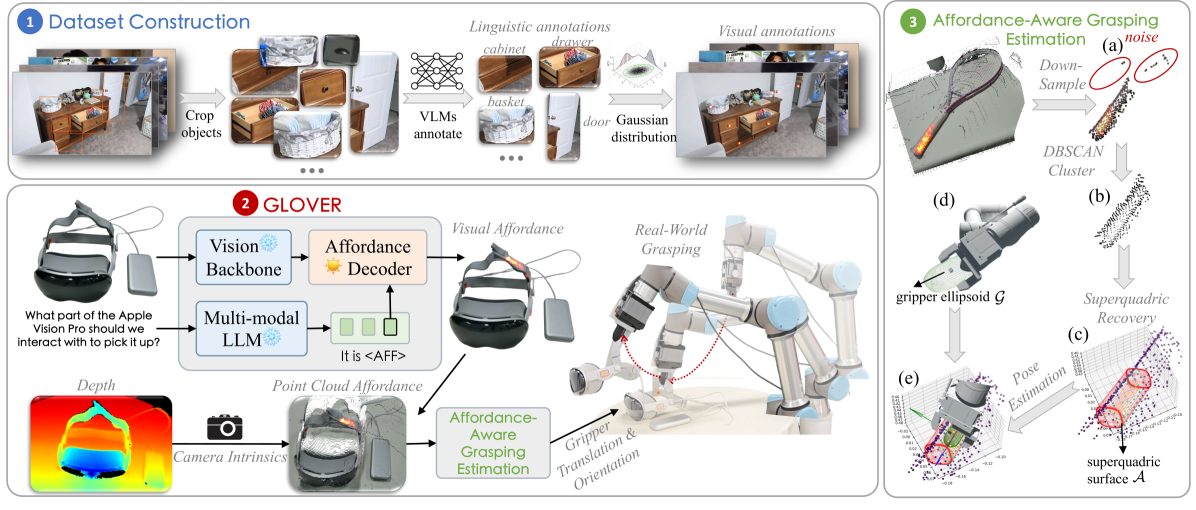
GLOVER: Generalizable Open-Vocabulary Affordance Reasoning for Task-Oriented Grasping
Simulation
GS-Playground: A High-Throughput Photorealistic Simulator for Vision-Informed Robot Learning


UniLab: A Heterogeneous Architecture for Robot RL Beyond GPU-Dominant Paradigms

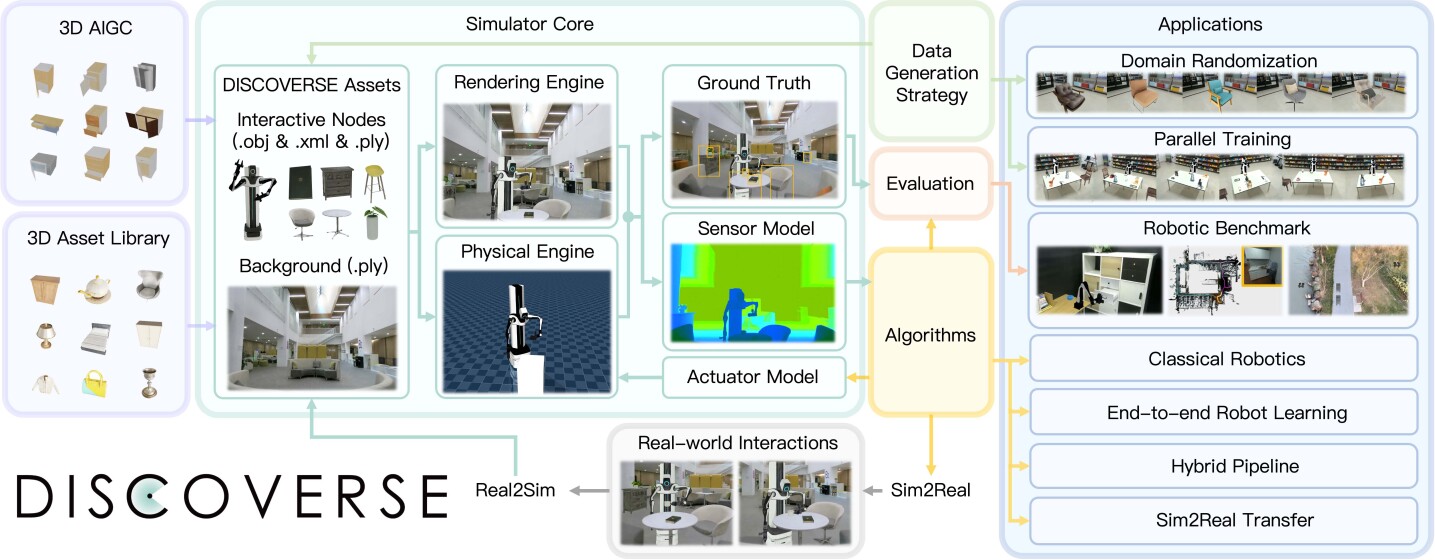
DISCOVERSE: Efficient Robot Simulation in Complex High-Fidelity Environments

FGGS-LiDAR: Ultra-Fast, GPU-Accelerated Simulation from General 3DGS Models to LiDAR
Open Source Projects
Awesome Loco-Manipulation

Curated resources for loco-manipulation research and engineering.

Education
PhD in Artificial Intelligence
- HKUST (Guangzhou)
- 2024 - 2027 (Expected)
- Supervisor: Junwei Liang
MSc in Robotics & Autonomous Systems
- HKUST (Guangzhou)
- 2022 - 2024, GPA: 3.84
- Supervisors: Ming Liu, Jun Ma
BEng in Automation
- Southwest Jiaotong University
- 2017 - 2021, Score: 85.45
- School of Information Science and Technology
Honors & Awards
- First Class Scholarship — Southwest Jiaotong University
- The Enterprise Scholarship — Southwest Jiaotong University
- Outstanding Students Cadre — Southwest Jiaotong University
Competitions
National Second Prize — ABU Robocon (Equestrian Simulation)
Developed Simulink simulation system and co-simulation with Adams for quadruped robot maneuvers.
National Third Prize — RoboMaster (DJI)
Developed LQR-based control framework, image processing and LiDAR sensing algorithms, sensor fusion, and hardware circuit design.
National Second Prize — ABU Robocon
Responsible for quadruped robot leg motion control and upper structure ejection/gripping device control.
Provincial Second Prize — Engineering Training Competition
Hardware circuit design, sensor data fusion with orthogonal code disk and DT35 laser ranging module.
Provincial Third Prize — Electronics Design Contest
Electromagnetic gun hardware circuit design, BP neural network-based control algorithm, and UCOS-III RTOS porting on ARM processor.
Contact: wang_zifan@outlook.com / zwang765@connect.hkust-gz.edu.cn / +86 135 1839 3890